
CANBus Simulator
- Portfolio
- CANBus Simulator
CANBus Simulator Overview
The CANBus Simulator is designed to replicate real-world CAN communication between devices in a controlled testing environment. It enables engineers to simulate CAN-based sensors and nodes that communicate with the Subsea Control Module (SCM). This allows developers to test system behavior without the need for actual hardware devices during early development stages. The simulator operates by creating virtual CAN nodes that behave like real devices on a CAN network. These nodes can transmit and receive messages, respond to commands, and generate simulated data for testing purposes. Through this simulation environment, developers can verify system functionality, identify communication issues, and optimize network performance. By using the simulator, system integration testing becomes significantly easier and more efficient. Engineers can validate message exchange, verify configuration settings, and test fault scenarios before deploying the system in real operational environments.

CANOpen Communication Protocol
CANOpen is a higher-layer communication protocol that operates on top of the CAN (Controller Area Network) bus system. While the CAN specification defines the physical and data link layers of communication, CANOpen standardizes how data is structured and exchanged between different nodes on the network. The protocol enables devices from different manufacturers to communicate seamlessly within the same network. It defines standardized object dictionaries, communication services, and device profiles, which ensure compatibility and efficient data transfer. This standardization simplifies system integration and reduces the need for custom communication protocols. CANOpen is widely used in industries such as automotive systems, oil and gas infrastructure, medical equipment, and industrial automation. Its flexibility and reliability make it particularly suitable for complex control systems like subsea monitoring networks.
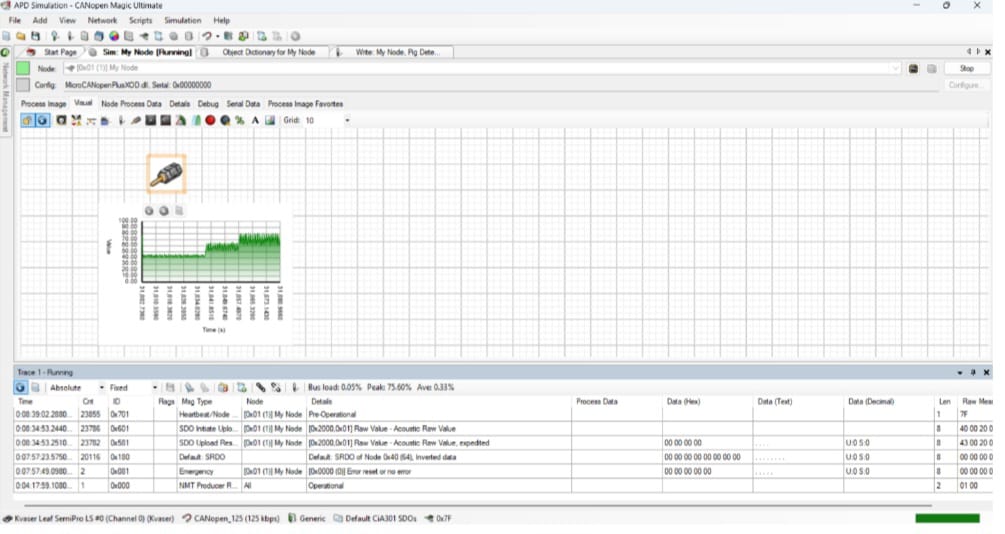
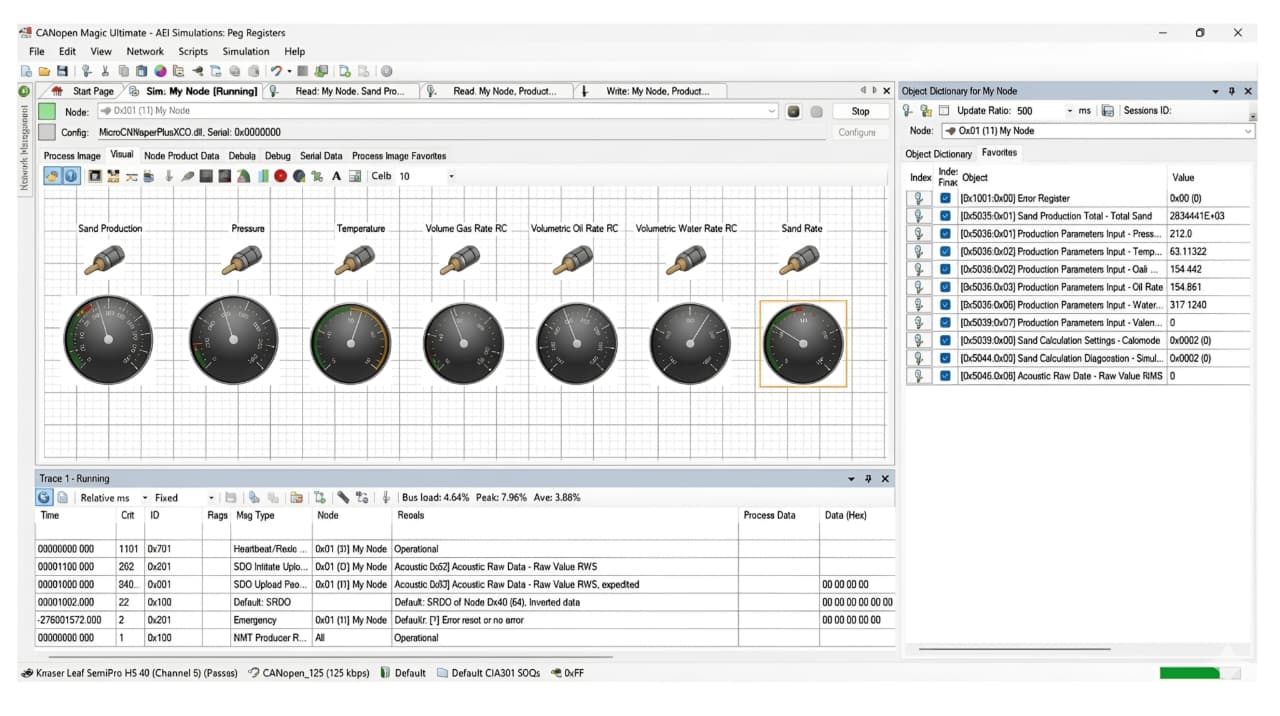
CANBus Simulation Software
The CANBus Simulation Software provides a comprehensive platform for configuring, testing, and monitoring CANOpen nodes. The software allows users to create simulated devices, configure communication parameters, and observe message exchange across the network in real time. Through its graphical interface, users can add simulation nodes, assign node identifiers, and configure process data entries. The software also includes tools such as signal generators, which simulate changing sensor values like pressure, temperature, or flow rates. This enables realistic testing of control systems and data processing algorithms. Additionally, the software provides monitoring tools such as trace logs, network overview windows, and object dictionary views. These tools help engineers analyze CAN traffic, detect communication errors, and verify that nodes are responding correctly to commands and data requests.